前言
上节课我们实现了三角形的光栅化,但是在渲染整个模型时,可以看到有很多不知道怎么形容的错误,即使我们没有使用正确的纹理,我们能看出来它的结构有很大的问题,只是因为我们错误渲染了很多应当被隐藏的面。
Z-Buffer算法用于解决这一问题。
Painter’s algorithm
如果我们将所有的三角形排序后渲染,那么后渲染的三角形理所应当会覆盖之前绘制的三角形,我们就可以看到一个正常显示的模型。
但是这么说起来还是太理想了,有下面几个问题:
- 如何对三角形进行排序?仅仅按照
z最大值/平均值或者其他关键字? - 如何处理三角形相交的问题?如果三角形A的一部分被B遮挡,而三角形A的另一部分遮挡了B,画家算法可以绘制出正确的图像吗(如下图,来源于tinyrenderer wiki)?
除了上面两个影响正确性的问题,画家算法伴随着高昂的计算成本。对于动态场景/静态场景内视角变化,我们需要每次重新对三角形排序。

Depth interpolation
深度插值并不是直接解决伪影的办法,它可以看作z-buffer的理论基础。在上节课,为了判断像素点是否在三角形内,我们得到了每个点的重心坐标。我们根据 $\alpha,\ \beta,\ \gamma$ 将像素点的颜色插值为三角形点的z坐标加权和,即:
1 |
|
我们可以绘制深度图像如下:

可以从图片上看出伪影还是很严重的。
Per-pixel painter’s algorithm (a.k.a. z-buffer)
看看下面一段代码:
1 |
|
效果:

可以看到运行结果有了极大的改善。为什么?
在深度插值算法中,我们对于每个三角形中的每个像素计算了一次深度。我们可以把这个深度存在一张单独的图片(zbuffer)中。在下一次计算这个像素的深度值时,我们将新的深度与buffer中的深度作比较,只有当zbuffer.get(x, y)[0] < z时才更新这个像素。
我们用同一套程序,还是随机填色,来更新上节课渲染的模型:
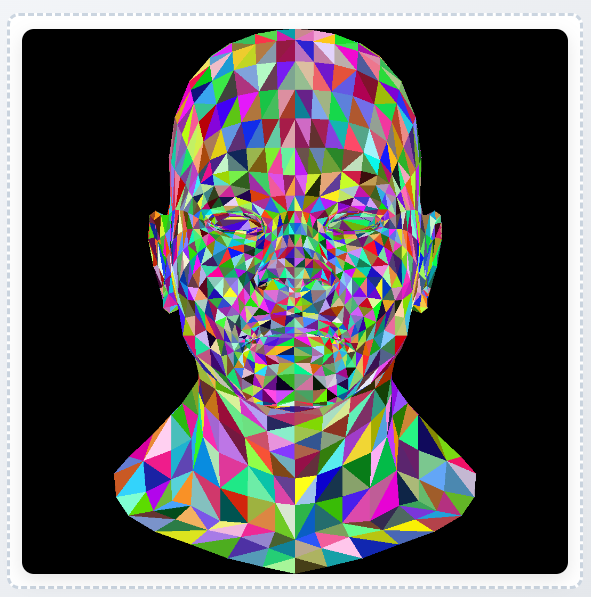
已经看不到伪影了。
作业:Texture
ssloy大神在v1的wiki中在这一章布置了添加纹理的作业,并提供了纹理贴图。
在obj格式模型以f开头的行,形如f 1/2/3 4/5/6 7/8/9中,我们之前使用的1 4 7为点坐标,而2 5 8对应的就是纹理坐标。
在模型读取函数中稍作修改,并保存每个三角形顶点的纹理坐标,那么只需要用同样的插值方法,我们就可以得到每个像素点对应的uv坐标。将这个uv坐标映射到纹理图像坐标上,可以取到纹理图像中的一个像素点,这个像素点就是最终的填色。
获取这个颜色的代码:
1 | float u = p0.u * alpha + p1.u * beta + p2.u * gamma; |
运行效果:
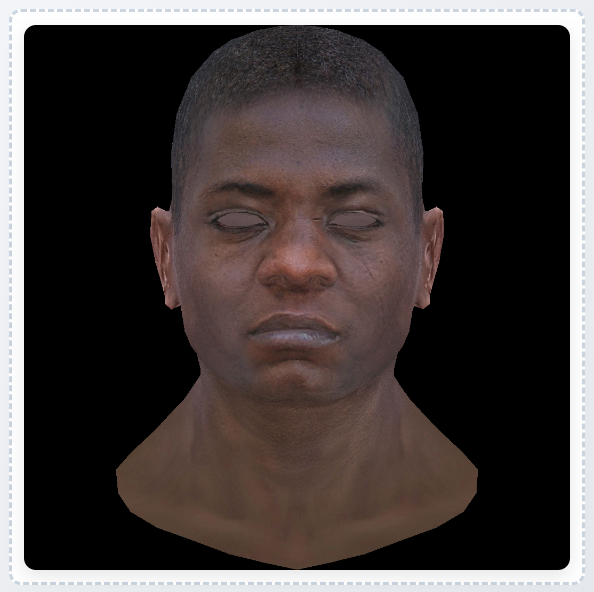
我们得到了比较完美的图像(他看上去没有眼睛,但实际上ssloy大神提供的模型就是没有眼睛的)。

